Ảnh hưởng của tốc độ quay đến hiệu suất bơm lùa trục đứng model ISG100-250, IRG100-250
1) Định luật đồng dạng – nền tảng phân tích
Với cùng hình học bơm và chất lỏng, khi thay đổi tốc độ quay n:
Lưu lượng: Q∝n
Cột áp: H∝n2
Công suất trục: P∝n3
Hệ quả trực tiếp: tăng tốc độ 10% → Q tăng ~10%, H tăng ~21%, nhưng P tăng ~33%. Nghĩa là điện năng “leo thang” nhanh hơn nhiều so với lưu lượng.
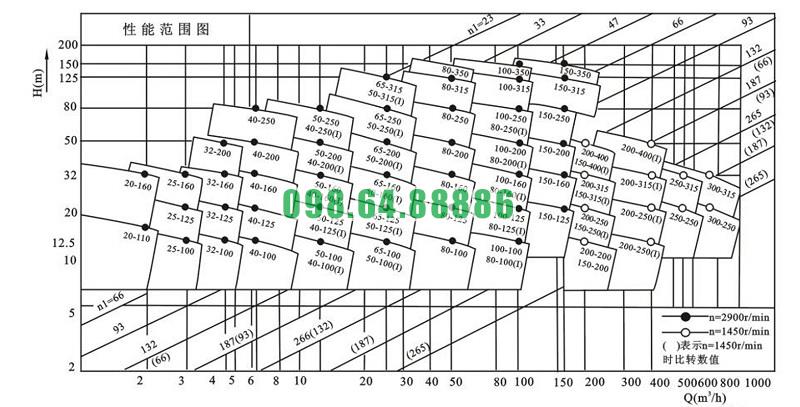
2) Vị trí BEP và hình dạng đường cong hiệu suất
BEP (Best Efficiency Point) dịch chuyển theo tốc độ: khi tăng n, BEP chuyển sang Q lớn hơn và H cao hơn; khi giảm n, BEP lùi về Q nhỏ hơn.
Hiệu suất cực đại của bơm thường không đổi nhiều theo n nếu điểm làm việc luôn “đi theo” BEP. Nhưng nếu hệ thống cố định làm bơm chạy xa BEP (quá trái do tiết lưu, quá phải do thiếu cột áp), hiệu suất giảm rõ rệt, rung ồn tăng.
3) Tốc độ và NPSH – rủi ro cavitation
Khi tăng n, tốc độ tuyệt đối ở cửa vào lớn hơn, NPSH required tăng; nếu NPSH available không theo kịp → nguy cơ xâm thực (cavitation) tăng, hiệu suất tụt, mẻ cánh/phớt nhanh.
Ngược lại, giảm n bằng VFD giúp hạ NPSHr, bơm “dễ thở” ở đầu hút, hiệu suất ổn định hơn.
4) Ảnh hưởng đến tổn thất và lực thủy lực
Tổn thất ma sát – xoáy trong bơm và đường ống tăng nhanh theo n (gần bậc hai), làm “ăn mòn” hiệu suất nếu chạy xa BEP.
Lực hướng kính/dọc trục tăng theo n, tải lên ổ trục – phớt lớn hơn → tăng ma sát cơ, giảm η tổng thể, rút ngắn tuổi thọ.
5) Mặt điện – cơ: mô tơ và hệ điều khiển
Mô tơ hiệu suất cao (IE3/IE4) giữ η tốt trong vùng 70–100% tải. Nếu giảm n bằng VFD, nên giữ mô-men và hệ số công suất hợp lý để η wire-to-water không sụt.
Ở tải quá thấp, dù bơm tiết kiệm thủy lực, η mô tơ + VFD có thể giảm; khi đó chạy nhiều bơm song song và tắt bớt là lựa chọn hiệu quả hơn một bơm chạy rất chậm.
6) Điều khiển tốc độ: VFD vs. tiết lưu bằng van
VFD: thay đổi n để điểm làm việc “trượt” theo đường cong bơm, bám gần BEP → giảm kWh/m³ rõ rệt, giảm NPSHr, giảm rung ồn.
Van tiết lưu: giữ n không đổi, ép đường cong hệ thống dịch lên → công suất điện vẫn cao, phần áp dư bị “đốt” qua van, hiệu suất tổng giảm.
7) Thực hành tối ưu cho ISG100-250, IRG100-250
Thiết lập tốc độ mục tiêu theo điểm xa nhất (ví dụ DP tại nhánh xa HVAC) để bơm luôn gần BEP.
Giới hạn tốc độ tối đa để không vượt NPSHa và không đẩy bơm vào vùng cavitation; kiểm tra biên NPSH khi tăng n.
Giới hạn tốc độ tối thiểu theo MCSF (Minimum Continuous Stable Flow) để tránh nội tuần hoàn và nóng cục bộ gây tụt hiệu suất/phá phớt.
Nếu hệ thống thường xuyên thừa cột áp, trim cánh + hạ n danh định sẽ tối ưu hơn chỉ hạ n.
Giám sát kWh/m³, rung RMS, nhiệt ổ trục, rò phớt trước–sau mỗi thay đổi n để xác nhận hiệu suất thực tế.
8) Ví dụ nhanh (định lượng)
Giả sử bơm đang chạy ở 100% tốc độ, công suất điện 30 kW. Giảm tốc xuống 90%:
Q ≈ 90%, H ≈ 81%, P ≈ 0.93 = 0.729 → 21% tiết kiệm điện.
Nếu điểm làm việc mới gần BEP hơn, hiệu suất bơm có thể tăng thêm vài phần trăm, kWh/m³ giảm sâu hơn con số theo luật đồng dạng.
Tốc độ quay chi phối trực tiếp lưu lượng, cột áp, công suất và vị trí BEP của bơm ISG100-250, IRG100-250. Tăng tốc nâng năng lực cung cấp nhưng làm công suất leo bậc ba và tăng rủi ro cavitation; giảm tốc bằng VFD giúp bám BEP, hạ NPSHr, giảm rung ồn và tối ưu kWh/m³. Tích hợp giới hạn tốc độ theo NPSH/MCSF, theo dõi chỉ số thực địa (kWh/m³, rung, nhiệt, rò phớt) là chìa khóa duy trì hiệu suất cao và độ tin cậy dài hạn.